Ford Ecosport: Power Steering / Description and Operation - Power Steering - System Operation and Component Description
System Operation
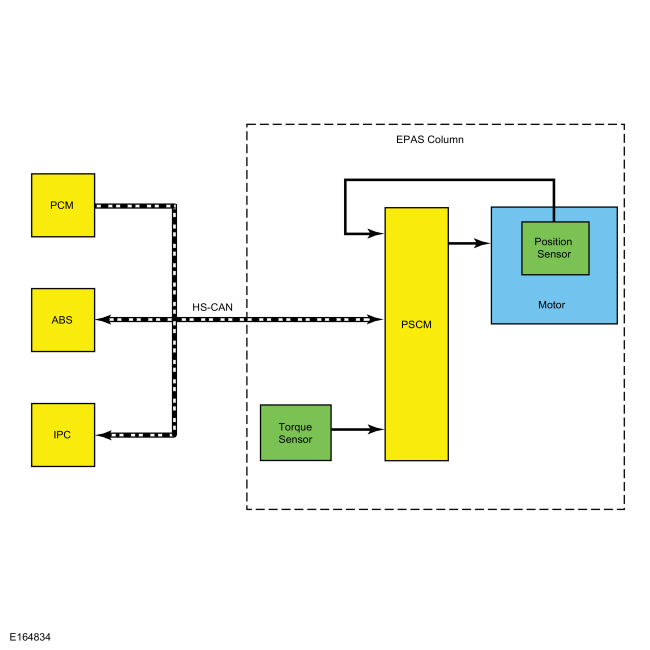
System Diagram

| Item | Description |
|---|---|
| 1 | EPAS column |
| 2 | HS-CAN |
| 3 | EPAS motor |
| 4 | Steering shaft position sensor |
| 5 | Steering shaft torque sensor |
| 6 | PSCM |
| 7 | IPC |
| 8 | ABS module |
| 9 | PCM |
Network Message Chart
Module Network Input Messages: PSCM
| Broadcast Message | Originating Module | Message Purpose |
|---|---|---|
| Engine speed | PCM | Engine speed is monitored to initiate EPAS activation and continued operation. |
| Engine status | PCM | Used to provide the PSCM with the current engine status; off, ready, cranking, running, stalled, afterrum, shutdown or not defined. |
| Vehicle configuration data | IPC | Used to provide the PSCM with the current vehicle configuration. |
| Vehicle configuration / information | IPC | Used to compare the PSCM configuration against the vehicle's specific configuration (central car configuration). |
| Vehicle speed | PCM | Used to determine the necessary level of steering assist. |
| Wheel speed data | ABS | Used to validate the steering wheel component angle by comparing the rotational speeds of each wheel. The difference in the speed of each wheel is used to derive a steering angle for comparison against the absolute steering angle sensor. |
EPAS System
The PSCM controls the functions of the EPAS system and communicates with other modules over the HS-CAN .
To activate the EPAS system, the PSCM must receive battery voltage at the hot at all times input, ignition voltage at the ignition input and the module must have a good ground connection. Once these criteria have been met, the PSCM begins monitoring the various sensor inputs and HS-CAN messages.
The main input for calculating the level of EPAS assist is the steering torque sensor signal. Vehicle speed is also taken into consideration to achieve the vehicle speed dependent steering assist characteristic.
The steering shaft is composed of an input shaft and an output shaft. The two parts of the steering shaft are connected to one another via a torsion bar. When the driver turns the steering wheel, torsion occurs in the steering shaft. The amount of torsion depends on the frictional force between the tires and the road surface. The torsion is increased by the use of the torsion bar, causing relative movement between the input and output shafts. This relative movement is detected by a steering shaft torque sensor and transmitted to the PSCM . The relative movement is the main parameter for calculating the control current for the EPAS motor and thus for the power assisting force. The PSCM uses a reversible motor to apply the steering assist.
The PSCM continually monitors and adjusts steering efforts based on the torque sensor, motor position and HS-CAN inputs to enhance the feel of the steering system. As vehicle speed increases, the amount of assist decreases to improve and enhance road feel at the steering wheel. As vehicle speed decreases, the amount of assist increases to ease vehicle maneuvering. Compensation is made to reduce the effect of pull or drift experienced when driving on roads with a high degree of camber. Also compensation for the impact of wheel imbalance on steering feel occurs until a predetermined threshold is reached.
The PSCM is self-monitoring and is capable of setting and storing Diagnostic Trouble Codes (DTCs). Depending on the DTC set, the PSCM may enter a failure mode. In addition, the PSCM may send a request to the IPC to display a message in the message center, alerting the driver of a potential EPAS concern. The warning message is sent over the HS-CAN to the IPC .
Pull Drift Compensation (PDC)
EPAS equipped vehicles have a Pull Drift Compensation (PDC) feature to assist drivers in compensating for variation in road and driving conditions. The feature adjusts power assist offset by reducing the steering wheel effort (input torque) required to keep the vehicle traveling straight. The Pull Drift Compensation (PDC) feature is automatically enabled at vehicle speeds above 40 km/h (25 mph) with sensors indicating the vehicle is traveling straight. Pull Drift Compensation (PDC) is designed to compensate for variations in road crown, the system detects input torque to the wheel by the driver to slowly ramp in a steering assist offset to neutralize, in most situations and within limits, steering efforts for the duration of time those driving conditions exist. Full compensation requires up to 45 seconds. Changing lanes on a multilane road and the expected change in road crown would trigger a change in torque input and a compensation adjustment, and is a normal operation of the Pull Drift Compensation (PDC) feature. The feature updates automatically and continuously, however, since it is based on input torque, the feature only works with both hands on the steering wheel while driving in a straight line. The system does not compensate when turning or during slight curves on highways. The system does not compensate if driver input torque, steering wheel angle or vehicle yaw rate is too large. For the system to compensate, the driver must have both hands on the steering wheel.
Failure Modes
When a DTC is present in the PSCM , the EPAS system enters 1 of 2 modes of operation.
Reduced Steering Assist Mode - The EPAS enters a reduced steering assist mode to protect the internal components of the EPAS system when a non-critical safety concern is detected by the PSCM , concerns such as low battery voltage, high battery voltage or over-temperature concerns are considered to be a non-critical safety concern. This reduced steering assist mode gives the steering operation a heavier than normal feel.
Manual Steering Mode - The EPAS system enters a manual steering mode (no electrical steering assistance is provided) when a concern considered to be a critical safety concern is detected. In manual steering mode, the vehicle has mechanical steering operation only which gives steering operation a heavy feel.
Component Description
EPAS Motor
The EPAS motor is a brushless type with a stator and 3 phases connected in star-delta. The rotor is a permanent magnet. The rotor position is detected by a total of 3 Hall-effect sensors and transmitted to the PSCM .
EPAS Steering Column
The EPAS steering column is an assembly consisting of a PSCM , a variable speed reversible motor, a steering shaft torque sensor and a reduction gearset, all of which are serviced as an assembly with the steering column.
PSCM
The PSCM is the ECU for the EPAS system. The module monitors all sensor inputs and HS-CAN messages relating to the EPAS system and directly controls the output of the EPAS motor.
Reduction Gearset
The reduction gearset consists of a worm gear which is permanently attached to the steering shaft and a worm shaft connected to the rotor of the EPAS motor.
Steering Shaft Torque Sensor
The steering torque sensor is mounted in the reduction gearset and is used by the PSCM to determine how much force is being used to turn the steering wheel and in which direction the steering wheel is being turned. This is accomplished using the electromagnetic induction between the sensor stator and the sensor rotor.
 Description and Operation - Power Steering - Overview
Description and Operation - Power Steering - Overview
Overview
The EPAS
system provides steering assist to the driver by replacing the
conventional, hydraulic pump system with an electric motor coupled to
the steering shaft...
 Removal and Installation - Steering Gear
Removal and Installation - Steering Gear
Removal
NOTE:
Removal steps in this procedure may contain installation details.
Remove the front subframe.
Refer to: Front Subframe (502-00 Uni-Body, Subframe and Mounting System, Removal and Installation)...
Other information:
Ford Ecosport 2014-2025 Service and Repair Manual: General Procedures - Parking Brake Cable Adjustment - Vehicles With: Rear Disc Brakes
Adjustment Apply the brake pedal 2 times. Detach the parking brake control boot and position the boot upward on the handle. Remove and discard the lock nut. Loosen the parking brake cable adjustment nut 5 full turns...
Ford Ecosport 2014-2025 Service and Repair Manual: Removal and Installation - Driver Door Module (DDM)
Removal NOTE: Removal steps in this procedure may contain installation details. NOTE: If installing a new module, it is necessary to upload the module configuration information to the diagnostic scan tool prior to removing the module...
Categories
- Manuals Home
- 2nd Gen Ford Ecosport Service Manual (2014 - 2025)
- Removal and Installation - Catalytic Converter
- Description and Operation - Jacking and Lifting - Overview
- Removal and Installation - Front Seat
- Removal and Installation - Evaporative Emission Canister Purge Valve
- Description and Operation - Evaporative Emissions - System Operation and Component Description
Removal and Installation - Front Brake Flexible Hose
Removal
Remove the wheel and tire.Refer to: Wheel and Tire (204-04A Wheels and Tires, Removal and Installation).
Remove the brake flexible hose bracket bolt.
Disconnect the brake tube fitting and remove the brake hose clip.
Loosen the brake hose fitting and remove the brake flexible hose.